1 RCNN
1 前言
最近在b站发现了一个非常好的 计算机视觉 + pytorch实战 的教程,相见恨晚,能让初学者少走很多弯路。
因此决定按着up给的教程路线:图像分类→目标检测→…一步步学习用pytorch实现深度学习在cv上的应用,并做笔记整理和总结。
up主教程给出了pytorch和tensorflow两个版本的实现,我暂时只记录pytorch版本的笔记。
参考内容来自:
- up主的b站链接:https://space.bilibili.com/18161609/channel/index
- up主将代码和ppt都放在了github:https://github.com/WZMIAOMIAO/deep-learning-for-image-processing
- up主的CSDN博客:https://blog.csdn.net/qq_37541097/article/details/103482003
2 RCNN
- R-CNN (Region with CNN feature)
Faster-RCNN 是从 R-CNN 到 Fast R-CNN,再到的 Faster R-CNN。R-CNN 可以说是利用深度学习进行目标检测的开山之作。其原始论文:Rich feature hierarchies for accurate object detection and semantic segmentation。
R-CNN 算法流程分四个步骤:
- 一张图像生成1k~2k个候选区域(使用 Selective Search 方法,SS算法)
- 对每个候选区域,使用深度网络(图片分类网络,例如VGG或者ResNet)提取特征
- 特征送入每一类SVM分类器,判断是否属于该类
- 使用回归器精细修正候选框位置。(使用 Selective Search 算法得到的候选框并不是框得那么准)

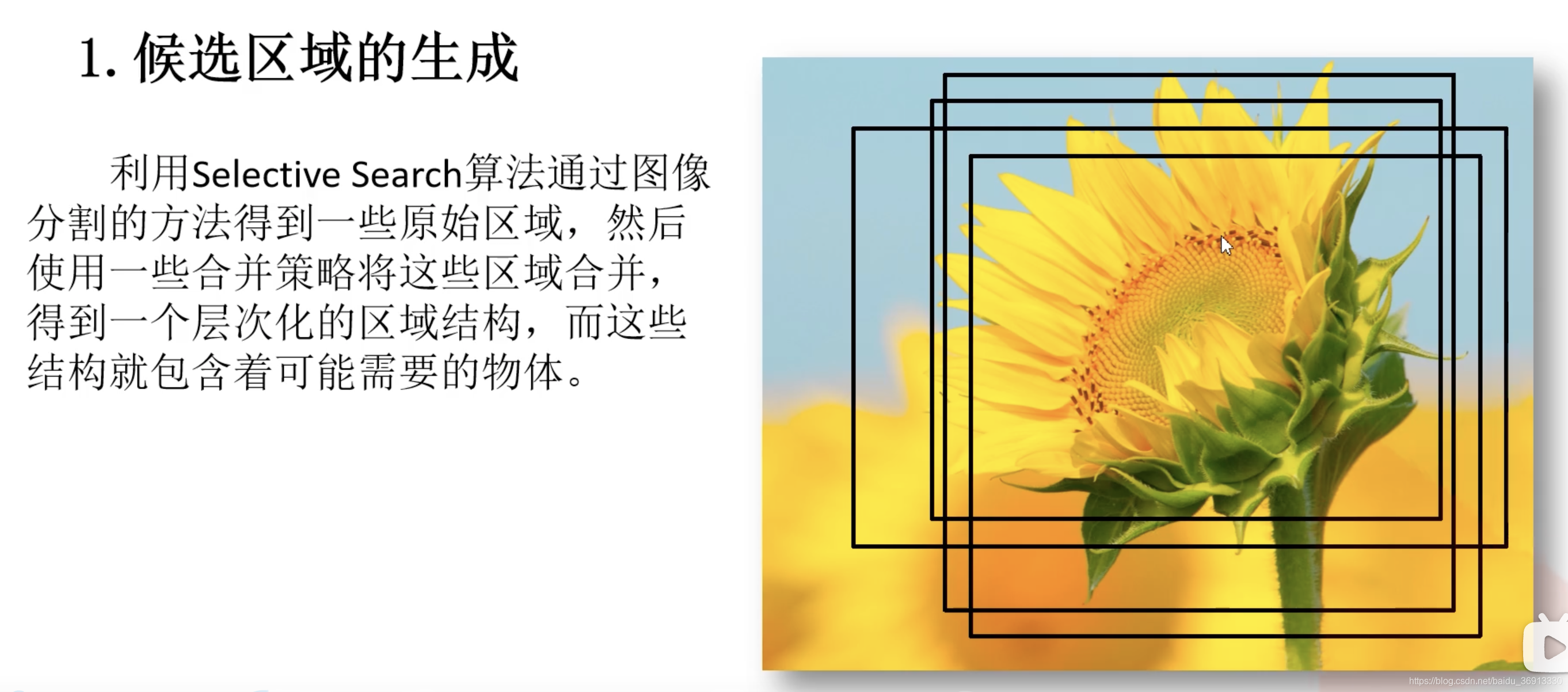
2.1 候选区域的生成
利用 Selective Search 算法通过图像分割的方法得到一些原始区域,然后利用一些合并策略将这些区域合并,得到一些层次化的区域结构,而这些结构就包含着可能需要的物体。这里的 SS 算法可以详见 此处,算法原始论文Selective Search for Object Recognition。。(初始区域的获取是引用另一篇论文的:Efficient Graph-Based Image Segmentation)
2.2 对每个候选区域使用深度网络提取特征
将2000个候选区域缩放为 227 × 227 227 \times 227 227×227 pixel,接着将候选区域输入事先训练好的 AlexNet CNN 网络获取 4096 维的特征得到 2000 × 4096 2000 \times 4096 2000×4096 的特征矩阵。(将后面的全连接层去除就得到了特征提取网络)
下图中的CNN就是之前降到的图像分类网络,只不过将最后的全连接层去掉。得到的是特征向量。

2.3 特征送入每一类的SVM分类器,判定类别
将得到 2000×4096 维特征与20个(数据集是20分类的)SVM组成的权值矩阵 4096×20 相乘,获得 2000×20 维矩阵表示每个建议框是某个类别的得分。对上述 2000×20 维矩阵中每一列即每一类进行非极大值抑制剔除重叠建议框,得到该列即该类中得分最高的一些建议框。


非极大值抑制的实现可见下图,首先找到得分最高的候选框,然后计算其他同类候选框与之的iou,删除所有iou大于阈值的候选框,然后下一个目标等等(极大值对应着重叠区域):

对 2000×20 维矩阵中每一列即每一类进行非极大值抑制,则可以剔除重叠建议框,保留高质量的建议框!
2.4 使用回归器精细修正候选框位置
对 NMS(非极大值抑制)处理后剩余的建议框进行进一步筛选。接着分别用 20 个回归器对上述 20 个类别中剩余的建议框进行回归操作,最终得到每个类别的修正后的得分最高的 bounding box。回归器得到四个值:x和y方向的偏移量,高度和宽度的缩放值。 回归器的具体训练方法在这里就没讲了,在讲Faster-RCNN的时候会进行讲解。我想应该是有预测框,有ground-truth然后训练得到的。

2.5 小结
总结起来,R-CNN 包括以下四部分:

在后面讲 Fast-RCNN 和 Faster-RCNN 的时候这四部分会逐步融合,最终生成一个端对端的完整的网络。
R-CNN 存在的问题:
- 测试速度慢
- 测试一张图约需要 53s (多核CPU),用SS算法提取候选框用时约 2s,一张图像内候选框之间存在大量的重叠,提取特征操作冗余(Fast RCNN将会对其进行优化)。
- 训练速度慢
- 过程及其繁琐
- 训练所需空间大
- 对于 SVM 和 bbox 回归训练,需要从每个图像中的每个目标候选框提取特征,并写入磁盘。对于非常深的网络如 VGG16,从 VOC2007 训练集上的 5k 张图像上提取的特征需要上百GB的存储空间。