linux调度策略
1 简介
本文对linux系统的调度进行简单的介绍,参考文章见下面附录
2 linux调度机制
参考资料:
- man手册man 7 sched
- 内核文档 Documentation/scheduler。
首先需要说明,我们常说的进程调度器是传统的说法,但是实际上进程是资源管理的单位,线程才是调度的单位.有时也会说任务调度等。
linux的调度机制由调度策略(policies)和优先级(priority)两个属性共同决定.其中调度策略又可以分为实时调度策略和通用调度策略(非实时)。其中通用调度策略的优先级值为0.而实时调度策略的优先级取值范围为1~99.可以看出,实时调度策略的优先级总是大于通用调度策略。而优先级高线程的总是会被调度器优先调用。其中实时调度策略包含SCHED_RR,SCHED_FIFO调度策略。通用调度策略包含SCHED_OTHER、SCHED_IDLE、SCHED_BATCH调度策略。即如下关系:
linux的调度机制由调度策略(policies)和优先级(priority)共同决定:
- 优先级:确定哪个线程被优先调度。实时调度策略的优先级总是大于通用调度策略。
- 调度策略(policies)分如下几种:
- 基于截止时间(deadline)的实时调度策略:优先级最高;在
SCHED_DEADLINE调度策略中,任务的优先级是通过截止时间(deadline)来确定的,而不是传统的优先级概念。较早截止时间的任务将具有更高的”优先级”,因为它们需要更早地完成。在SCHED_DEADLINE中,优先级的比较是基于截止时间的大小。- SCHED_DEADLINE
- 实时调度策略:spriority值的取值范围为0~99.当线程间的优先级不同时,按照优先级高的先调度原则。当优先级相同时,分为如下两种方式:
- SCHED_RR:优先级相同的线程按固定的时间片循环调度。下面会详细讲解。
- SCHED_FIFO:与SCHED_RR相似,优先级相同的线程也是循环调度。不过没有时间片的概念。下面会详细讲解。
- 通用调度策略(非实时):spriority值为0.
- SCHED_OTHER
- SCHED_IDLE:
- SCHED_BATCH:
- 基于截止时间(deadline)的实时调度策略:优先级最高;在
所有的调度策略最后通过链表的方式组合成一个调度类。由linux内核调度。

3 调度策略介绍
实时调度策略之SCHED_RR:Round-robin scheduling
- 当线程间的优先级不同时,优先级高的先调度。当优先级相同时,固定的时间片循环调度。被调用的线程满足如下条件时会让出CPU:
- 调度期间的时间片使用完了。
- 自动放弃CPU。如调用了阻塞相关的接口函数或调用了sched_yield()。
- 被一个优先级更高的线程抢占了
- 线程终止了。
- 如果因为时间片使用完了或自愿放弃CPU而导致线程让出CPU,此时此线程将会被放置在与其优 先级级别对应的队列的队尾。如果因为被抢占而让出CPU,则会放置到队头,等更高优先级让出cpu时,继续执行此线程。
实时调度策略之SCHED_FIFO:First in-first out scheduling
- 与SCHED_RR实时调度策略相似,不过它没有时间片的概念。被调用的线程让出CPU条件与SCHED_RR类似,只是没有时间片使用完的情况
通用调度策略之SCHED_OTHER:time-sharing scheduling
- 分时循环调度策略。也就是我们常说的CFS(Completely Fair Scheduler)完全公平调度器。是系统的默认调度策略。按动态时间片循环调度。动态时间片由nice属性值决定。每个SCHED_OTHER策略的线程都拥有一个nice值,其取值范围为−20~19,默认值为0.nice值是一个权重因子,值越小,权重越大。CPU为其分配的动态时间片会越多。
通用调度策略之SCHED_BATCH
- 此策略会让频繁被唤醒的线程在调度时次数会变少。其他与SCHED_OTHER策略类似。
通用调度策略之SCHED_IDLE
- 可以理解为nice=19的SCHED_OTHER策略。当系统中没有其他线程需要使用CPU时才会大量使用CPU。
调度策略之SCHED_DEADLINE
- 自从3.14版本以来,Linux提供了一个截止日期调度策略(SCHED_DEADLINE)。
4 调度相关的用户空间接口
修改nice值相关的函数接口:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19int nice(int inc)
所属头文件:`<unistd.h>`
描述:修改当前进程的nice值。此函数已经被更通用的setpriority()取代。
inc:在当前nice的基础上加inc.
return: 如果成功,返回新设置的nice值。
eg:nice(3)、nice(-5)
int setpriority(int which, int who, int prio)
描述: 设置通用进程的nice值。这里的priority不要与上边讲到的优先级混淆。
which:决定who传入的参数含义,which可选值:
PRIO_PROCESS:表明who为进程id.如果等于零,则为当前进程
PRIO_PGRP:表明who为进程组id.如果等于零,则为当前进程组
PRIO_USER:表明who为用户(real user)id.如果等于零,则为当前用户
prio:-20~19之间的nice值。
return: 成功返回0。失败返回-1.。
int getpriority(int which, int who)
所属头文件:<sys/time.h>,<sys/resource.h>
描述:获取进程的nice值。
return: 返回进程调度优先级(-20~19)。
eg: getpriority(PRIO_PROCESS, getpid());
修改优先级与调度策略相关的函数接口:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47int sched_get_priority_max(int policy)
描述: 查看调度策略最大优先级。
policy 可指定的值如下:
SCHED_OTHER
SCHED_BATCH
SCHED_IDLE
SCHED_FIFO
SCHED_RR
return: 成功返回最大优先级值。失败返回-1.
int sched_get_priority_min(int policy)
查看调度策略最小优先级。其他同sched_get_priority_max().
int sched_setscheduler(pid_t pid, int policy,const struct sched_param *param)
描述: 设置进程的调度策略和优先级。
policy 可指定的值如下:
SCHED_OTHER
SCHED_BATCH
SCHED_IDLE 对于这三种策略,param->sched_priority的值必须为0.
SCHED_FIFO
SCHED_RR 对于这两种策略,需要指定param->sched_priority的值。
param:指定调度策略的优先级。struct sched_param的结构体如下:
struct sched_param {
int sched_priority; //优先级1~99
};
1
2
3
return: 成功返回0。失败返回-1.
int sched_getscheduler(pid_t pid)
所属头文件:<sched.h>
描述: 获取进程的调度策略。
pid 进程id.如果为0,表示为本线程。
return: 成功返回调度策略值(非负整数)。失败返回-1.
SCHED_OTHER 0
SCHED_FIFO 1
SCHED_RR 2
SCHED_BATCH 3
SCHED_IDLE 5
int sched_setparam(pid_t pid, const struct sched_param *param)
描述: 设置进程的优先级。sched_setscheduler()函数的子集。
param:见sched_setscheduler()函数中的描述。
return: 成功返回0。失败返回-1.
int sched_getparam(pid_t pid, struct sched_param *param)
描述: 获取进程的优先级。
param:见sched_setscheduler()函数中的描述。用于接收要获取的优先级值。
return: 成功返回0。失败返回-1.linux特有的函数接口,可用于修改上边提到的所有属性:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21int sched_setattr(pid_t pid, struct sched_attr *attr,unsigned int flags)
描述: 设置进程的调度策略。
struct sched_attr结构体如下:
struct sched_attr {
u32 size; //结构体大小
u32 sched_policy; //调度策略
u64 sched_flags; //可选属性:SCHED_FLAG_RESET_ON_FORK 表示子进程创建时不继承此策略。
s32 sched_nice; //通用调度策略的nice值
u32 sched_priority; //优先级
/* Remaining fields are for SCHED_DEADLINE */
u64 sched_runtime;
u64 sched_deadline;
u64 sched_period;
};
flags 目前为0.
return: 成功返回0。
int sched_getattr(pid_t pid, struct sched_attr *attr,unsigned int size, unsigned int flags)
描述: 获取进程的调度策略。
size: attr结构体的大小。
其他参数同sched_setattr().其他接口:
1
2
3
4
5
6int sched_yield(void)
描述:进程主动放弃cpu.
int sched_rr_get_interval(pid_t pid, struct timespec *tp)
获取SCHED_RR调度策略的进程在每次使用CPU时分配到时间片的长度。
tp:获取到的时间长度。
成功返回0,失败返回-1.
线程相关的调度设置函数:相关线程属性设置。
5 linux实时补丁
为了满足实时性和可预测性的要求,通常会使用实时补丁。一个常见的实时补丁是PREEMPT-RT。PREEMPT-RT是一组Linux内核的补丁,旨在提高内核的实时性能,减小中断和任务切换的延迟,以支持对响应性能有严格要求的应用,例如自动驾驶系统。
实时补丁需要配置内核和构建内核,这里就不介绍了,引用一下网上的测试结果对比一下
利用cyclictest进行性能测试:
将编译完成的cyclictest加载到板卡上,并增加其可执行权限,就可以利用cyclictest命令来进行linux内核实时性能测试,测试命令为:
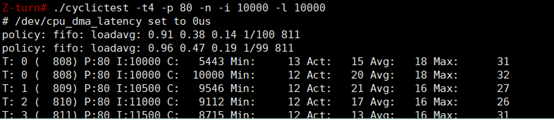
./cyclictest -t8 -p 80 -n -i 10000 -l 10000
常用参数
-p —prio=PRIO 最高优先级线程的优先级 使用时方法为: -p 90 / —prio=90
-m —mlockall 锁定当前和将来的内存分配
-c —clock=CLOCK 选择时钟 cyclictest -c 1 0 = CLOCK_MONOTONIC (默认) 1 = CLOCK_REALTIME
-i —interval=INTV 基本线程间隔,默认为1000(单位为us)
-l —loops=LOOPS 循环的个数,默认为0(无穷个),与 -i 间隔数结合可大致算出整个测试的时间,比如 -i 1000 -l 1000000 ,总的循环时间为1000*1000000=1000000000 us =1000s ,所以大致为16分钟多
-n —nanosleep 使用 clock_nanosleep
-h —histogram=US 在执行完后在标准输出设备上画出延迟的直方图(很多线程有相同的权限)US为最大的跟踪时间限制
-q —quiet 使用-q 参数运行时不打印信息,只在退出时打印概要内容,结合-h HISTNUM参数会在退出时打印HISTNUM 行统计信息以及一个总的概要信息
-f —ftrace ftrace函数跟踪(通常与-b 配套使用,其实通常使用 -b 即可,不使用 -f )
-b —breaktrace=USEC 当延时大于USEC指定的值时,发送停止跟踪。USEC,单位为谬秒(us)
运行结果含义
| T: 0 | 序号为0的线程 |
|---|---|
| P: 0 | 线程优先级为0 |
| C: 9397 | 计数器。线程的时间间隔每达到一次,计数器加1 |
| I: 1000 | 时间间隔为1000微秒(us) |
| Min: | 最小延时(us) |
| Act: | 最近一次的延时(us) |
| Avg: | 平均延时(us) |
| Max: | 最大延时(us) |
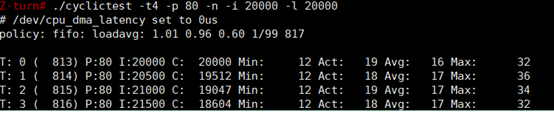
在我们的板卡上进行实时性测试,先对非实时系统进行测试,得到测试结果如下:
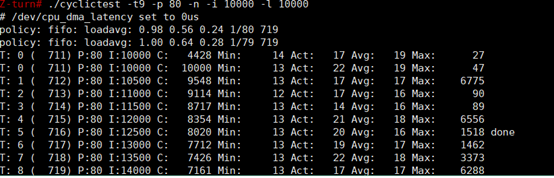
对实时性系统进行测试,得到的测试结果如下: